Tras haberos presentado en las páginas de Todotrial los detalles de la Mecatecno Dragonfly-E Proto y la Gas Gas TXTe EGD, además de haber probado las ElectricMotion, sólo nos quedaba conocer en detalle la SoREv para tener una visión al completo del plantel de motos eléctricas que tomaron parte en la primera edición de la Copa del Mundo de Trial-E y con ello conocer hacia donde va el futuro de las trialeras eléctricas…
SoREv Proto Electric II
 Para muchos el futuro de los medios de transporte está cambiando claramente con la revolución de los vehículos eléctricos, una tecnología que en realidad cuenta con más de un siglo de historia pero que no ha sido hasta ahora cuando se está desarrollando de manera más evidente, dadas las presiones ecologistas. Sean estas últimas o no la motivación de este tipo de motorizaciones, lo cierto es que despiertan mucho interés y que en el caso del trial ofrecen interesantes ventajas, como son el bajísimo nivel sonoro, las emisiones cero, o, también, su sorprendente par y capacidad de tracción…
Para muchos el futuro de los medios de transporte está cambiando claramente con la revolución de los vehículos eléctricos, una tecnología que en realidad cuenta con más de un siglo de historia pero que no ha sido hasta ahora cuando se está desarrollando de manera más evidente, dadas las presiones ecologistas. Sean estas últimas o no la motivación de este tipo de motorizaciones, lo cierto es que despiertan mucho interés y que en el caso del trial ofrecen interesantes ventajas, como son el bajísimo nivel sonoro, las emisiones cero, o, también, su sorprendente par y capacidad de tracción…
Esto último es lo que pudimos constatar de primera mano al realizar una pequeña toma de contacto con la espectacular SoREv, realizada artesanalmente por el excampeón de España de Trial en la categoría de Veteranos, Joan Solé Rovira, un ingeniero apasionado no sólo por el trial sino por la innovación tecnológica. Con él hablamos para conocer en detalle su creación.
Joan Solé combina su pasión por el trial y por su trabajo en la Escuela Politécnica Superior de Ingeniería de Vilanova i la Geltrú (EPSEVG), perteneciente a la Universidad Politécnica de Cataluña. Amablemente nos contó su proyecto y evoluciones con todo detalle, mostrando que derrocha pasión por el trial y por la ingeniería.
 Al subir en la moto lo primero que tuvimos en cuenta es cambiar el chip, sobretodo con el embrague, ya que no es necesario apretarlo para parar la moto. Esta puede ir a una velocidad increíblemente baja, nunca se cala, y su capacidad de tracción es realmente espectacular. Nos llamó poderosamente la atención que tras haber competido durante dos días en un trial en la máxima categoría, la moto parecía que acababa de estrenar el neumático trasero, ¡apenas lo había gastado!
Al subir en la moto lo primero que tuvimos en cuenta es cambiar el chip, sobretodo con el embrague, ya que no es necesario apretarlo para parar la moto. Esta puede ir a una velocidad increíblemente baja, nunca se cala, y su capacidad de tracción es realmente espectacular. Nos llamó poderosamente la atención que tras haber competido durante dos días en un trial en la máxima categoría, la moto parecía que acababa de estrenar el neumático trasero, ¡apenas lo había gastado!
Pero veamos como son las características de la SoRev, para después dejar que el propio Joan Solé nos cuente en detalle. Incorpora un motor de imanes permanentes, modelo Agni 95-R, que ofrece una potencia de hasta 18 kW (aproximadamente 24 CV). Lleva acoplado un cambio de marchas de 6 velocidades con embrague de diafragma, tomado de una GasGas. Se alimenta con una batería de polímero de lítio (LiPo) de 40 Ah de autonomía y su peso total es de 81.5 kg, siendo este su punto débil, por el momento. Joan Solé nos comenta detalles sobre cada uno de los componentes:
 – Joan, la moto realmente va increíble, comencemos por lo más desconocido para casi todos, la batería
– Joan, la moto realmente va increíble, comencemos por lo más desconocido para casi todos, la batería
– A nivel de baterías, estas son de polímero de litio (LiPo) con una capacidad de 40Ah (Amperios•hora). Con esta capacidad, aproximadamente, se puede estar entrenando durante dos horas y media sin parar, o realizar enduro durante algo más de media hora. Cuando la batería está cargada, su voltaje es de 58.8 V (Voltios). A parte de la autonomía, la característica más destacable de esta batería es la de poder suministrar hasta unos 18 kW (kiloWatios), lo que supone unos 24 CV (caballos de vapor). La nota negativa de esta batería es el peso (de 13 kg), si bien, la relación entre peso, autonomía y potencia es más que correcta.
– Por lo que vemos has querido que el motor ofrezca una potencia bastante superior a otras motos eléctricas. ¿Cuales son sus características?
– El motor es de corriente continua, de imanes permanentes y con escobillas. En comparación con los motores sin escobillas (denominados motores «brushless») estos motores tienen el inconveniente de no poderse sumergir en el agua, por lo que debe evitarse realizar pasos en zonas de río donde la profundidad supere el nivel de la posición del motor. Otro inconveniente de los motores con escobillas es el mantenimiento de estas. Sin embargo, debo añadir que después de cuatro años intensos de uso del motor, aún no he tenido que realizar el cambio de las escobillas. A pesar de estos inconvenientes, cuando tomé la decisión de elegir este motor prioricé las característica de potencia y de par motor.
 – ¿Qué potencia estimada puede dar este motor?
– ¿Qué potencia estimada puede dar este motor?
– Este motor puede desarrollar hasta 30 CV de potencia, con un par en el eje del motor de hasta 43 N•m (Newtons por metro) y tiene un peso de 11 kg. Los motores sin escobillas que encontré en el mercado con potencias similares tenían un peso mínimo de 15 kg.
– Para controlar todo el funcionamiento, la electrónica será clave, ¿no?
– Sí, el tercer elemento clave de un vehículo eléctrico es el controlador. Este dispositivo, a partir de la información obtenida de diversos sensores (posición del puño de gas, velocidad del motor, voltaje de la batería, temperatura de los elementos de la batería, temperatura del motor, temperatura de los elementos de potencia del controlador, marcha engranada, par motor, par resistente, etc…) decide el voltaje que debe suministrar al motor.
– ¿Qué peculiaridades tiene este controlador?
 – La mayor parte del esfuerzo que he dedicado durante el desarrollo de este prototipo de motocicleta eléctrica ha sido aplicado a la modificación electrónica y a la programación del controlador. Algunas de las características particulares que he implementado pueden ser ajustadas en cualquier momento a través del teléfono móvil. De esta manera se puede, por ejemplo, modificar el recorrido eléctrico del puño de gas y la respuesta del motor para cada posición y velocidad de rotación de este, los mapas de potencia para cada marcha y en función del estado de carga de la batería, los mapas de inercia para cada marcha (he implementado una simulación del efecto del volante de inercia que puede ajustarse en función de la velocidad y la aceleración de rotación del eje del motor), los mapas de retención para cada marcha, la corrección de la entrega de potencia en función de la velocidad de deslizamiento de los discos de embrague, los mapas de freno regenerativo para cada marcha (ayuda en la frenada mientras recarga la batería), etc…
– La mayor parte del esfuerzo que he dedicado durante el desarrollo de este prototipo de motocicleta eléctrica ha sido aplicado a la modificación electrónica y a la programación del controlador. Algunas de las características particulares que he implementado pueden ser ajustadas en cualquier momento a través del teléfono móvil. De esta manera se puede, por ejemplo, modificar el recorrido eléctrico del puño de gas y la respuesta del motor para cada posición y velocidad de rotación de este, los mapas de potencia para cada marcha y en función del estado de carga de la batería, los mapas de inercia para cada marcha (he implementado una simulación del efecto del volante de inercia que puede ajustarse en función de la velocidad y la aceleración de rotación del eje del motor), los mapas de retención para cada marcha, la corrección de la entrega de potencia en función de la velocidad de deslizamiento de los discos de embrague, los mapas de freno regenerativo para cada marcha (ayuda en la frenada mientras recarga la batería), etc…
 – ¿Entonces permite regular todos los parámetros y jugar con una especie de telemetría?
– ¿Entonces permite regular todos los parámetros y jugar con una especie de telemetría?
– Sí, claro, dispone de un sistema de telemetría que, si bien lo implementé para poder analizar el comportamiento interno del programa informático del controlador, también permite analizar los pasos por las zonas observando gráficamente y de forma simultánea la posición del puño de gas, la velocidad de la rueda, su aceleración, el par motor, el par resistente, el nivel de los impactos generados al subir un escalón, o las pérdidas de tracción al pasar por una superficie deslizante, entre otros. Estos datos se recogen con muy alta resolución (a intervalos de dos milésimas de segundo) durante el tiempo que dura el paso por la zona y permiten analizar fácilmente, por ejemplo, en que momento cortas el gas cuando afrontas un escalón.
– Parece que lo único que nos es más familiar a los trialeros tradicionales son las suspensiones, frenos y transmisión…
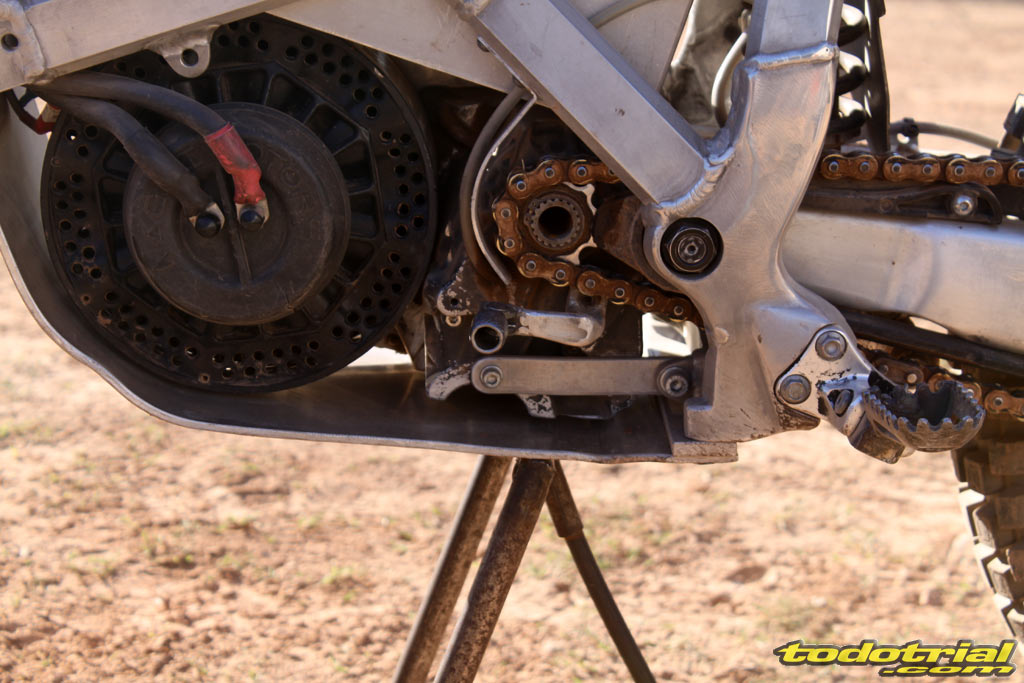
 – Sí, los frenos y suspensiones son convencionales, y por lo que se refiere a la transmisión mecánica, la base es un cárter de motocicleta GasGas de trial adaptado y acoplado a una transmisión primaria por engranajes. Así que se dispone de un cambio de seis velocidades y un embrague de diafragma accionado hidráulicamente, todo ello bañado en aceite.
– Sí, los frenos y suspensiones son convencionales, y por lo que se refiere a la transmisión mecánica, la base es un cárter de motocicleta GasGas de trial adaptado y acoplado a una transmisión primaria por engranajes. Así que se dispone de un cambio de seis velocidades y un embrague de diafragma accionado hidráulicamente, todo ello bañado en aceite.
– Tu moto entonces ha sido la primera en incorporar un cambio de marchas y embrague convencionales, ¿por qué?
– Disponer del cambio de marchas de seis velocidades es importante en tanto que permite minimizar el consumo de batería cuando se realizan los recorridos de interzona, permitiendo ajustar la marcha a las exigencias del terreno. El embrague es necesario básicamente para poder dosificar la entrega de potencia del motor en la parte final de la subida de una rampa o de un escalón.
 – Al parecer tu gran enemigo es entonces el peso.
– Al parecer tu gran enemigo es entonces el peso.
– El peso de la motocicleta es de 81.5 kg. Si bien el tarado de las suspensiones y la configuración de las curvas de potencia permiten disimular la sensación de moto pesada cuando la conduces, ciertamente este peso es una característica negativa de este prototipo. Cuando me planteé este proyecto mi principal objetivo era el de conseguir unas prestaciones en autonomía, potencia y peso lo más similares posibles a las motos térmicas comerciales de trial que todos conocemos. En este punto, puede ser interesante plantearse cuál debe ser la relación óptima entre los requisitos de potencia, autonomía y peso para una disciplina tan particular como es el trial. En cualquier caso, ojalá no tenga que esperar muchos años para poder conocer la respuesta a esta cuestión, que seguro que la resolverá la evolución comercial y deportiva de la moto de trial eléctrica.
– Volvamos a los inicios, ¿cómo se te ocurrió iniciar este proyecto?
 – Considero que las restrictivas leyes de acceso al medio natural han favorecido una cierta corriente de opinión negativa en relación a la práctica del deporte del trial. Con el principal objetivo de averiguar si se puede revertir esta opinión, en junio de 2013, construí (gracias a la colaboración inicial de Beta Trueba) mi primer prototipo de motocicleta eléctrica.
– Considero que las restrictivas leyes de acceso al medio natural han favorecido una cierta corriente de opinión negativa en relación a la práctica del deporte del trial. Con el principal objetivo de averiguar si se puede revertir esta opinión, en junio de 2013, construí (gracias a la colaboración inicial de Beta Trueba) mi primer prototipo de motocicleta eléctrica.
– ¿En qué se diferenciaba de la que nos muestras hoy?
– Esta primera motocicleta no tenía ni embrague ni cambio de marchas y, al poco tiempo de conducirla, me di cuenta de la necesidad del embrague, por lo que he comentado antes, se hacía necesario dosificar la potencia en ciertos momentos.
– Y rápidamente empezaste a probarlo en competición.
– Sí, con este prototipo enseguida empecé a competir en diversas pruebas de campeonatos sociales de trial.
 – Entonces comenzaste a trabajar en un segundo prototipo.
– Entonces comenzaste a trabajar en un segundo prototipo.
– En el año 2015 decidí construir un segundo prototipo de motocicleta, diseñando un nuevo chasis y añadiendo un cambio de marchas de 6 velocidades, para participar en el Campeonato de España en la categoría que mejor se ajusta a mi nivel de pilotaje, la de veteranos.
– ¿Crees que los resultados sobre la eléctrica fueron similares a los que habrías obtenido en una moto térmica?
– Tanto entrenando como compitiendo, compartiendo zonas con las motos térmicas, he llegado a la conclusión de que los resultados que he obtenido con esta motocicleta son similares a los que, probablemente, habría conseguido de haber conducido con mi moto térmica. Esto, unido a la facilidad de conducción que supone la motocicleta eléctrica a velocidades lentas, donde el par motor es muchísimo mayor que en el caso del motor térmico y, además, nunca se «cala», a mi parecer, demuestra que esta tecnología aplicada a nuestro deporte es, ya hoy, muy apropiada.
 – ¿Una posible comercialización del prototipo estaba entre tus planes?
– ¿Una posible comercialización del prototipo estaba entre tus planes?
– Modestamente, debo admitir que también inicié este trabajo con la pretensión de poder contribuir a estimular a la industria del sector de cara a que se empezase a invertir en el desarrollo de prototipos de motocicletas eléctricas de trial para adultos y, consecuentemente, para su posterior comercialización. Sin embargo, y sin ánimos ni autoridad para reprochar nada a nadie, debo admitir que mis expectativas iniciales eran demasiado optimistas, ya que, a día de hoy, solo (me quejo por cantidad y no por calidad) es posible encontrar en el mercado una marca comercial de motocicletas eléctricas de trial para adultos, que es la conocida y admirada Electric Motion.
– ¿Cómo ves tu moto en comparación al resto de motos eléctricas que se están desarrollando?
 – En la reciente primera edición de la Copa FIM de Trial-E, celebrada con motivo de la prueba del Campeonato del Mundo de Trial en Francia, han participado tres empresas fabricantes de motocicletas: Electric Motion, Mecatecno y GasGas. Cuando realizo un inevitable ejercicio de comparación a partir de las características publicadas de estos tres modelos de motocicleta, observo que todas tienen un peso bastante o muy inferior, una menor autonomía y algo o bastante menos de potencia con referencia a mi moto. Ello me lleva a plantearme la duda sobre la conveniencia, o no, de cambiar las baterías de mi moto por unas de más ligeras (con menos autonomía), o hasta de desarrollar un nuevo prototipo. Así que, actualmente, estoy sondeando los distintos modelos de baterías y de motores (sin escobillas) existentes en el mercado para poder tomar una decisión en este sentido.
– En la reciente primera edición de la Copa FIM de Trial-E, celebrada con motivo de la prueba del Campeonato del Mundo de Trial en Francia, han participado tres empresas fabricantes de motocicletas: Electric Motion, Mecatecno y GasGas. Cuando realizo un inevitable ejercicio de comparación a partir de las características publicadas de estos tres modelos de motocicleta, observo que todas tienen un peso bastante o muy inferior, una menor autonomía y algo o bastante menos de potencia con referencia a mi moto. Ello me lleva a plantearme la duda sobre la conveniencia, o no, de cambiar las baterías de mi moto por unas de más ligeras (con menos autonomía), o hasta de desarrollar un nuevo prototipo. Así que, actualmente, estoy sondeando los distintos modelos de baterías y de motores (sin escobillas) existentes en el mercado para poder tomar una decisión en este sentido.
– En el Mundial de Lourdes finalizaste en el quinto puesto ante pilotos más jóvenes y motos más ligeras.
 – Un buen resultado, aunque al finalizar el trial me di cuenta de que tenía configurado un mapa de inercia demasiado agresivo. Esto provocaba que cuando cortaba gas y, al mismo tiempo, se producía una desaceleración brusca como consecuencia de impactar la rueda con algún obstáculo, el motor aceleraba automáticamente, pero demasiado. Lástima que no pensé en este problema hasta después de finalizar la carrera, ya que durante la competición llevaba el teléfono en el bolsillo y hubiese sido muy fácil y rápido corregir este problema. No se puede tener todo… (N. de la R. podéis ver este problema en el segundo 16 del tercer vídeo que encontrarás a continuación).
– Un buen resultado, aunque al finalizar el trial me di cuenta de que tenía configurado un mapa de inercia demasiado agresivo. Esto provocaba que cuando cortaba gas y, al mismo tiempo, se producía una desaceleración brusca como consecuencia de impactar la rueda con algún obstáculo, el motor aceleraba automáticamente, pero demasiado. Lástima que no pensé en este problema hasta después de finalizar la carrera, ya que durante la competición llevaba el teléfono en el bolsillo y hubiese sido muy fácil y rápido corregir este problema. No se puede tener todo… (N. de la R. podéis ver este problema en el segundo 16 del tercer vídeo que encontrarás a continuación).
– ¿Podremos encontrar la SoREv en las tiendas algún día?
– Aunque, de momento, no tengo la intención de comercializar mi motocicleta, tampoco puedo descartar que en un futuro más o menos lejano, toda la experiencia que estoy adquiriendo con el desarrollo de este proyecto (en el caso de que se considere interesante aprovechar alguna parte) pueda ser revertida de alguna manera en este pequeño mundillo que compartimos los practicantes del trial.



{kind=link}